Stáhnout je možné následovně:
Rubrika: Zajímavosti o součástkách
Součástky emitující záření a zobrazovací jednotky
Součástky emitující záření
Svítivé diody LED (Light Emitting Diode)
· Přivedeme-li do diody proud v propustném směru dochází po překonání prahového napětí k rekombinacím elektronů a děr v blízkosti PN přechodu
· Přitom se uvolňuje energie ve formě elektromagnetického záření
· Jedna rekombinace = jedno kvantum (vspontání emise)
· Záření je monochromatické (má jen jednu vlnovou délku)
· Každé příměsi v polovodiči náleží určitá energie, tedy λ
Druhy
Diody emitující světlo
· Barvy: červená, žlutá, modrá, bílá atd.
Infra diody
· Emitují infračervené záření
Dvou barevné LED
· Jsou dva přechody PN s různými prahovými napětími
Ultrafialové diody
· Emitují UV záření
Použití
· Zobrazovací jednotky
· Indikátory
· Osvětlení (luminiscenční diody)
Veličiny
· Uc = napájecí napětí
· IF = proud v propustném směru (určen typem a svítivostí)
· UF = napětí v propustném směru
·
Laserové diody
· Zatím co v LED probíhá emise záření spontáně, tak v LD je emise stimulovaná (vynucená)
· Elektrony vystupují do vyšších energetických hladin ve velkém množství a hromadí se tam (inverzní populace)
· K jejich návratu pak postačuje impuls (foton) a jejich spadnutím na původní hladinu se uvolní další fotony
· Návrat elektronů na původní hladinu proběhne naráz v jednom okamžiku
· Vzniklý svazek fotonů se dále zesílí v rezonátoru (tj. v dutině o délce λ/2)
· Kmitáním fotonu v rezonátoru v rezonátoru se uvolní další fotony a celý svazek pak v jediném okamžiku polopropustným zrcadlem vyrazí ven
· Vzniklý svazek záření je koherentní (uspořádaný) – zachovává fázi a směr nemění se s časem
· Záření je fázové – všechny fotony mají stejnou fázi
· Záření je monochromatické
· Záření je vysoce směrové – zachovává směr – malá divergence
· Vznik inverzní populace elektronů se dosáhne tzv. čerpáním
· Čerpání v LD vzniká při překročení mezní proudové hustoty (při menší proudové hustotě je emise spontání a LD svítí jen jako LED)
Výhody laserů z LD
· Vysoká účinnost (50%) přeměny elektrické energie na koherentní záření
· Lze dobře modulovat
Další druhy laserů
· Rubínové
· Plynové (CO2)
Výbojky
· Jsou zdroje záření (nejčastěji světla nebo UV)
· Používají se jako světelné zdroje, zobrazovací jednotky atd.
Princip
· Elektrický výboj v plynech
· Pokud zironizujeme plyn tvořící náplň výbojky a přivedeme na elektrody napětí, vznikne pohyb iontů k opačně nabitým elektrodám
· Ionty se srážejí a energie srážek se uvolňuje ve formě elektromagnetického záření
· Vlnová délka záleží na náplni (druhu směsi plynů) a tlaku
· Vlnových délek bývá obvykle více
· Zapalovací napětí způsobí vznik výboje, načež napětí prudce poklesne a výbojkou začne procházet proud
· Proud je nutno omezit na přiměřenou mez (to leze provést: předřadnou impedancí (tlumivka/odpor), nebo použitím měkkého zdroje napětí, či elektronického předřadníku
Elektronky
· Jsou nejstarší aktivní elektronické součásti
· Byly vystřídány tranzistory
· Dnes se užívají ve výkonové elektronice
Popis
· Vakuovaná skleněná baňka obsahující elektrody (anodu a katodu)
Katoda
· Přímo nebo nepřímo žhavená
· Žhavením se dodává energie elektronům, aby mohli vystoupit do vakua
Anoda
· Má kladné napětí proti katodě
· Přitahuje elektrony ve vakuu
Mřížky
· Jsou v různém počtu mezi katodou a anodou
· Napětím na nich se reguluje tok elektronů
Použití
· Speciální zesilovače
· CRT obrazovky
Zobrazovací jednotky
· Rozdělení se provádí podle různých hledisek (podle množství (hustoty) informace)
Zobrazovací jednotky s předem vytvořenými znaky
Digitrony
· Výbojky tvarované např. jako číslice
· Velké napájecí napětí až 100 V
· Mají společnou anodu, nebo katodu
Segmentové
· Jsou 7 segmentové nebo 16 segmentové
· Znaky či obrazce jsou tvořeny segmenty
· Segmenty mohou tvořit LED nebo tekuté krystaly LC
Maticové
· Matice tvořené body (např.: 5*7 bodů)
· Body mohou tvořit žárovky, LED, monitory apod.
Monitory
· CRT – Catode Ray Tube
· LCD – Liguid Crystal Display
· Plazmové – PDP (Plasma Display Panel)
· OLED – Organic LED
CRT
· Vnitřek je vakuovaný
· Ze žhavené katody vystupují elektrony, které jsou urychlovány kladným vysokým napětím anody a dopadající na stínítko
· Mřížky slouží k zaostření elektronového svazku, regulaci jasu a zatemnění při zpětných bězích
· Nejpre se tvoří liché a potom sudé řádky obrazu
· Stínítko je pokryto luminofory (světlonoši), které přeměňují kinetickou energii elektronů na světlo
Vychylování paprsků
Elektromagnetické
· Dvě dvojice vychylovacích cívek kolmo na sebe (horizontálně a vertikálně) (pro RGB 3*2 = 6 cívek)
· Využívá se Lorenzova síla
· Použití PC a TV
Elektrostatické
· Dva páry vychylovacích destiček (horizontální a vertikální pár)
· Pro vertikální vychýlení jsou horizontální desky
· Užívá se síla působící na elektrony v elektrostatickém poli
· Požitá osciloskopy
Obnovovací frekvence
· Musí být taková, aby nebylo znatelné blikání (i když luminofory mají určitou setrvačnost)
· TV 25 snímků/sekunda (střídání sudých a lichých řádků)
· PC alespoň 75 Hz (100 Hz)
Barevný CRT
· Obsahuje 3 katody – elektronová děla (trisky), 3 druhy luminoforu (RGB)
Maska
· Je umístěna před stínítkem tak, aby paprsek z každé trisky dopadal vždy jen na luminofor své barvy
· Je umístěna cca 17 mm před stínítkem
· Rozteč bodů je přibližně 0,25 mm
· Rozlišení 1600*1200 (4:3)
Druhy
· Delta, inline, Trinitron – otvory přez celou obrazovku vertikálně, je těžký
Míchání barev
· Aditivní (stírání) – provádí se regulací elektronových svazků (Rmax+Gmax+Bmax = bílá)
Vlastnosti
Kladné
· Jas, kontrast, odezva, pozorovací úhel, cena
Záporné
· Ostrost, geometrie, spotřeba, rozměry, hmotnost, nevhodné pro epileptiky, nadměrná zátěž očí (u PC)
LCD
Tekuté krystaly
· Jsou zvláštní látky
· V LCD se užívá nematická struktura (má krystaly nestejně dlouhé, navzájem rovnoběžné avšak různě posunuté a vyplňující celý prostor)
· Bez el. pole jsou krystaly neuspořádané
· V el. poli se krystaly seřadí
· Propouštíme-li světlo přes dva na sebe kolmé polarizační filtry, světlo projde jen tehdy, odráží-li se od neuspořádaných molekul mezivrstvy z tekutých krystalů (bez napětí projde s napětím neprojde)
Hlavní části LCD
· Polarizační filtry – jsou zařízení, které umožní prostup pouze otického záření s určitým úhlem kmitání
· Tekuté krystaly – jsou téměř průzračné substance vykazující vlastnosti pevné hmoty i kapaliny
· Elektrody ITO (oxid india a cínu) – přivedením napětí na ITO elektrodu proti společné průhledné elektrodě se reguluje prostupnost LC pro světlo
· Průhledná elektroda
· Barevné filtry (RGB) propouští jen jednu barvu
Druhy matic
Pasivní
· Přivedení napětí na jeden řádek a sloupec se rozsvítí průsečík
· Zastaralé
TFT – aktivní
· Každá ITO elektroda má svůj tranzistor => menší řídící napětí
· Neovlivňují se sousední body
· TFT se sepne napětím na It gare line (výběr řady) a napětím na signal line (výběr jednotlivých subpixelů)
Podsvícení
· LCD není aktivní, musí mít zdroj světla
· Reflexní LCD
Cizí zdroje světla
· LED
· Výbojka
· EL fólie
· Display musí být podsvícený rovnoměrně – difúzní rozptylná deska, nebo světlovody
· regulace jasu a míchání barev se provádí změnou napětí na ITO
vlastnosti
kladné
· jas, kontrast, doba odezvy, ostrost, geometrie, spotřeba, rozměry
záporné
· pozorovací úhel a cena
PDP
· plazma je zvláštní skupenství hmoty, směs iontů, elektronů a molekul
· PDP komůrky plněné plynem při nízkém tlaku (60 – 70kPa)
· V el. poli vzniká plazmový výboj, který produkuje UV záření
· Vnitřní strana komůrek je pokryta luminofory a UV záření z výboje se v nich přeměňuje na světlo
· Barvy jsou dány druhem luminoforu, tzv. barevný fosfor
Elektrody
· Dvě elektrody nestačí, výboj by nastal se spožděním
Zobrazovací či displejové – horizontální
· Nazýváme SCAN
Podpůrné
· Nazýváme SUSTAIN
Datové
· Adresovací
· Vertikální
Vznik světla
Přivedením napětí mezi SCAN a SUSTAIN
· Vzniká ionizace
· Komůrka je těsně před prahem výboje
Přivedením nižšího napětí mezi SCAN a datovou elektrodu
· Vzniká výboj
Vznik světla
· Snížením napětí mezi SCAN a SUSTAIN = zhasnutí
· Regulovat jas napětím nelze
· Jas je řízen dobou výboje – poblikávání
Vlastnosti
· Vyžaduje výkonné chlazení
Kladné
· Doba odezvy, pozorovací úhel, ostrost, geometrie, rozměry
Záporné
· Jas, kontrast, spotřeba, cena, životnost
OLED
· Má vlastní zdroj světla (emituje se z elektrod)
Princip
· V aktivní vrstvě polovodiče dochází k rekombinacím nosičů náboje, při kterých vzniká světlo
· Rozsvěcování bodů je řízeno maticí
Barvy
· Vznikají přímo dle materiálu aktivní vrstvy
· Život je limitován nejslabším článkem – modrou
PMOLED (Pasive Matrix OLED) matice
· Užívají se pro displeje s menším množstvím informace
AMOLED (Aktive Matrix OLD) matice
· Užívají se pro displeje s větším množstvím informace
· Mají do struktury přidanou další vrstvu obsahující tenkovrstvé TFT tranzistory umožňující zrychlit zobrazování displeje
· Obnovovací frekvence je vysoká
· Nedochází k chvění obrazu
Výhody
· Kontrast, jas, ostrost, pozorovací úhle, spotřeba, vysoká svítivost, velký rozsah pracovních teplot, tloušťka 2mm
· Bravy se mění v závislosti na velikosti proudu, není třeba RGB míchání, libovolná brava se tvoří přímo
Použití
· Zatím jen menší displeje (rychlý vývoj)
· Vyrábí se FOLED – displejová fólie (ohebná)
EL panel (elektroluminiscenční panel)
Princip
· V aktivní látce se vytvoří pomocí napětí mezi elektrodami silné elektrické pole
· El. pole bývá střídavé s frekvencí např.: 400 Hz
· Dochází k vybuzení aktivní látky
· Nárazy do molekul sulfidu zinečnatého (ZnS) popř. dalších látek => vznik světla
· Barva je závislá na druhu aktivní látky
El. fólie
· Užívá se k podsvícení
· Jsou monochromatické
El. matice (dvě technologie)
LED
· Trošku odlišná technologie
TFEL
· Podobný TFT
· Spínací tranzistory
Elektrický odpor
Elektrický odpor je fyzikální veličina charakterizující schopnost elektrických vodičů vést elektrický proud.
Hodnota elektrického odporu je dána materiálem, tvarem i teplotou vodiče. Velikost odporu závisí na délce vodiče (přímo úměrně), na obsahu průřezu vodiče (nepřímo úměrně), na materiálu vodiče (měrný elektrický odpor) a na teplotě.
Na teplotě závisí odpor vodičů i polovodičů. Odpor vodičů se vzrůstající teplotou stoupá (kladný teplotní součinitel elektrického odporu), kdežto odpor polovodičů, uhlíku a některých speciálních slitin kovů se vzrůstající teplotou klesá (záporný teplotní součinitel elektrického odporu). Elektrický odpor má vždy kladnou hodnotu. Dobré vodiče kladou malý odpor, špatné vodiče kladou velký odpor.
Převrácená hodnota elektrického odporu je fyzikální veličina, která se nazývá elektrická vodivost.
Slovem odpor se označuje také pasivní elektrotechnická součástka, jejíž správný název je rezistor, a která se vyznačuje jedinou vlastností – elektrickým odporem.
Značení
- Značka veličiny: R (angl. Resistance)
- Základní jednotka: ohm, zkratka Ω
- Další používané jednotky: kiloohm, 1 kΩ = 1 000 Ω
Výpočet
Elektrický odpor lze určit z vlastností vodiče pomocí vztahu:
kde ρ je měrný el. odpor (rezistivita materiálu), l je délka vodiče a S obsah průřezu vodiče. K výpočtu lze také použít Ohmova zákona:
kde U je napětí na koncích vodiče a I je proud procházející vodičem.
Měření
Eletrický odpor se měří digitálním nebo analogovým měřícím přistrojem nebo Ohmovou metodou, srovnávací metodou a substituční metodou. K napájení obvodu s odporem musíme použít vždy stejnosměrný proud, protože měřením při střídavém napájení bychom nezjistili velikost elektrického odporu, ale hodnotu impedance celého obvodu. Při měření elektrických odporů působí na měřící obvod různé rušivé vlivy, které mohou ovlivňovat zejména měření velmi malých nebo velmi velkých odporů. Mezi tyto rušivé vlivy patři mimo jiné parazitní indukčnost a parazitní kapacita odporu.
Rozdělení
Z hlediska velikosti můžeme elektrické odpory rozdělit na:
- malé – do 1 Ω
- střední – 1 Ω až 1 MΩ
- velké – nad 1 MΩ
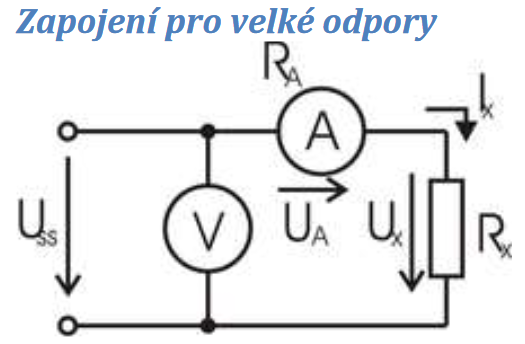
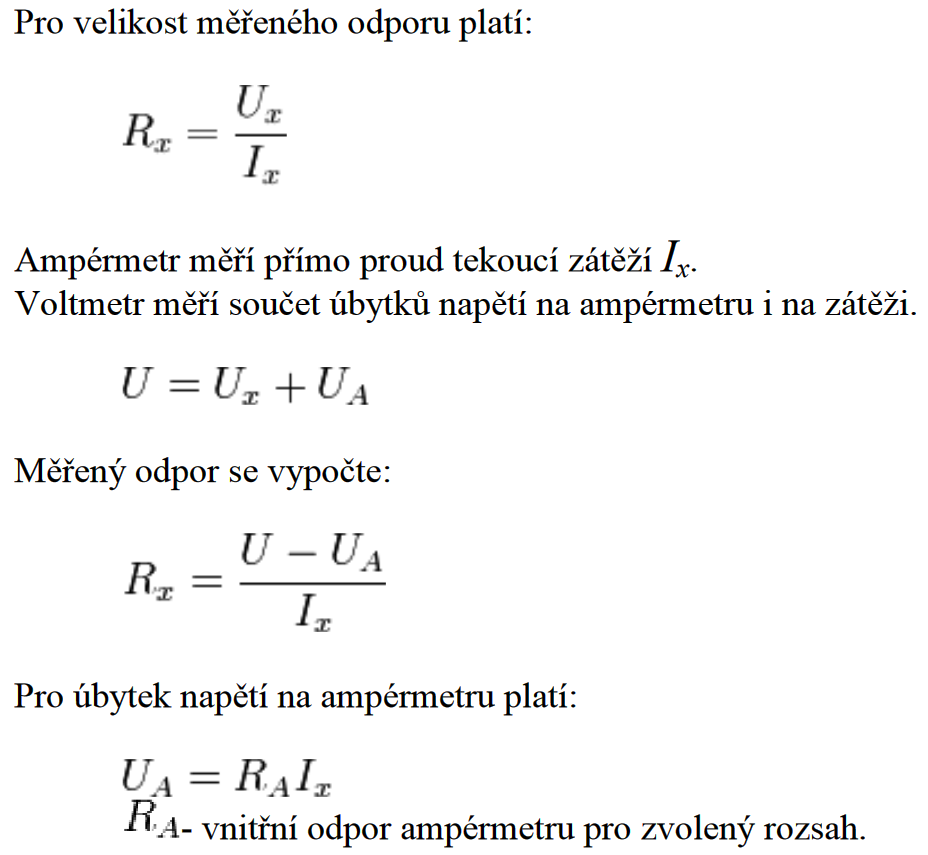
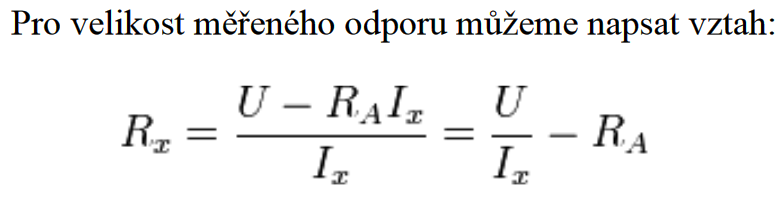
Ohmova metoda
Ohmova metoda měření elektrického odporu je klasický způsob měření, při němž vypočítáváme velikost odporu měřené zátěže pomocí Ohmova zákona. Platí vztah:
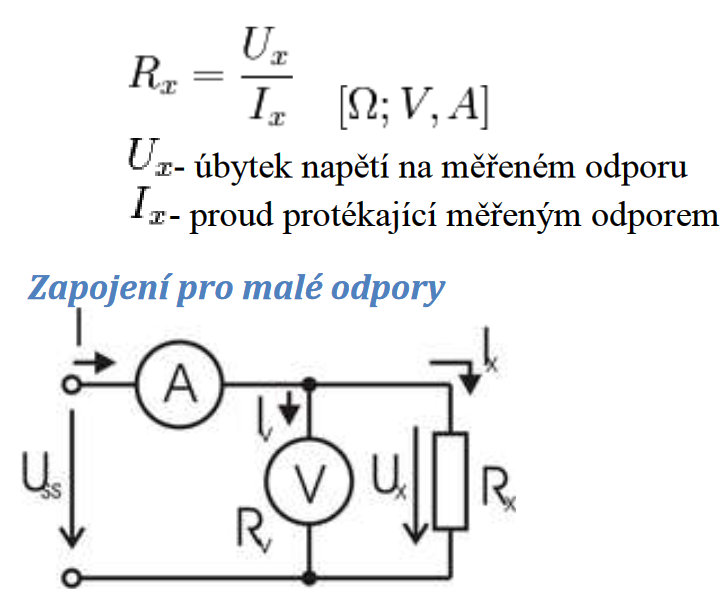
Ampérmetr měří proud, který prochází měřeným odporem a zároveň proud, který prochází voltmetrem.

Pokud bychom počítali odpor zátěže pouze jako podíl hodnot naměřených voltmetrem a ampérmetrem, dopustili bychom se určité chyby metody.
Srovnávací metoda
Při měření odporu srovnávací metodou porovnáváme neznámý odpor s odporem známé velikosti.

Velikost neznámého odporu zjistíme změřením úbytků napětí na jednotlivých rezistorech. Proud v obvodu musí být konstantní. Protože oběma rezistory teče stejný proud, platí:
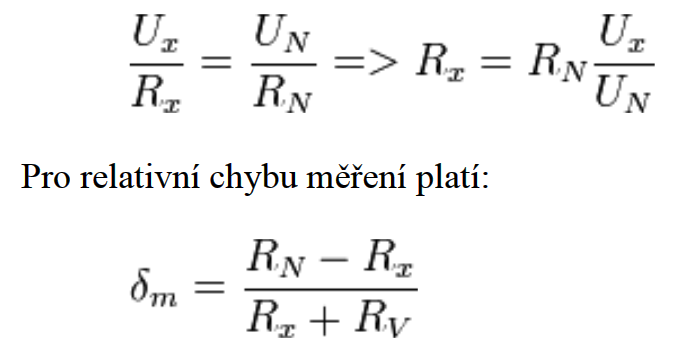
Čím více se budou hodnoty Rx a RN sobě přibližovat, tím větší bude chyba měření. Bude-li RV >> Rx , bude chyba metody prakticky zanedbatelná. Tato metoda je velmi přesná, velikost odporu můžeme zjistit s přesností až na několik setin procenta.
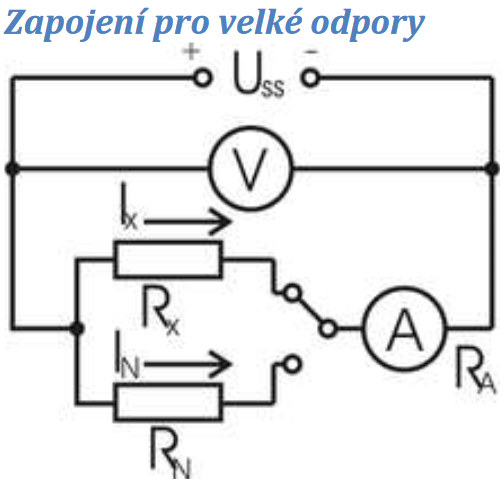
Rezistory jsou zapojené paralelně. Napětí musí být po celou dobu měření konstantní. Velikost odporu se zjišťuje srovnáním proudů tekoucích jednotlivými rezistory. Platí:
Čím menší bude vnitřní odpor ampérmetru, tím menší bude chyba měření. Měření bude přesnější, když budou hodnoty RN a Rx blíže u sebe. Pro tuto metodu měření je vhodné, aby byl měřený odpor v rozsahu 1 kΩ až 1 MΩ.
Teplotní závislost
Závislost elektrického odporu vodiče na teplotě lze vyjádřit vztahem:
kde R0 je odpor vodiče při normální teplotě, α je teplotní součinitel elektrického odporu a Δt je teplotní rozdíl.
Za speciálních podmínek může elektrický odpor některých látek klesnout téměř na nulu. Takovým látkám se říká supravodiče.
Výkonová ztráta
Když teče tělesem s odporem R proud I dochází k přeměně elektrické energie na teplo. Tuto přeměnu lze vyjádřit vztahem:
kde P je výkon měřený ve wattech, I je proud měřený v ampérech a R je odpor měřený v ohmech. Tento jev je užitečný u zařízení jako žárovka nebo elektrické topení (přímotop), ale je nežádoucí při přenosu energie. Obvyklým způsobem redukce výkonové ztráty je užívání tlustších vodičů a vyšších napětí. Ve speciálních aplikacích se používají supravodiče.
Termočlánky
Hodnoty součástí v řadách
| E3 | 1.0 | 2.2 | 4.7 | |||||||||
| E6 | 1.0 | 1.5 | 2.2 | 3.3 | 4.7 | 6.8 | ||||||
| E12 | 1.0 | 1.2 | 1.5 | 1.8 | 2.2 | 2.7 | 3.3 | 3.9 | 4.7 | 5.6 | 6.8 | 8.2 |
| E24 | 1.0 | 1.1 | 1.2 | 1.3 | 1.5 | 1.6 | 1.8 | 2.0 | 2.2 | 2.4 | 2.7 | 3.0 |
| 3.3 | 3.6 | 3.9 | 4.3 | 4.7 | 5.1 | 5.6 | 6.2 | 6.8 | 7.5 | 8.2 | 9.1 | |
| E48 | 1.00 | 1.05 | 1.10 | 1.15 | 1.21 | 1.27 | 1.33 | 1.40 | 1.47 | 1.54 | 1.62 | 1.69 |
| 1.78 | 1.87 | 1.96 | 2.05 | 2.15 | 2.26 | 2.37 | 2.49 | 2.61 | 2.74 | 2.87 | 3.01 | |
| 3.16 | 3.32 | 3.48 | 3.65 | 3.83 | 4.02 | 4.22 | 4.42 | 4.64 | 4.87 | 5.11 | 5.36 | |
| 5.62 | 5.90 | 6.19 | 6.49 | 6.81 | 7.15 | 7.50 | 7.87 | 8.25 | 8.66 | 9.09 | 9.53 | |
| E96 | 1.00 | 1.02 | 1.05 | 1.07 | 1.10 | 1.13 | 1.15 | 1.18 | 1.21 | 1.24 | 1.27 | 1.30 |
| 1.33 | 1.37 | 1.40 | 1.43 | 1.47 | 1.50 | 1.54 | 1.58 | 1.62 | 1.65 | 1.69 | 1.74 | |
| 1.78 | 1.82 | 1.87 | 1.91 | 1.96 | 2.00 | 2.05 | 2.10 | 2.15 | 2.21 | 2.26 | 2.32 | |
| 2.37 | 2.43 | 2.49 | 2.55 | 2.61 | 2.67 | 2.74 | 2.80 | 2.87 | 2.94 | 3.01 | 3.09 | |
| 3.16 | 3.24 | 3.32 | 3.40 | 3.48 | 3.57 | 3.65 | 3.74 | 3.83 | 3.92 | 4.02 | 4.12 | |
| 4.22 | 4.32 | 4.42 | 4.53 | 4.64 | 4.75 | 4.87 | 4.99 | 5.11 | 5.23 | 5.36 | 5.49 | |
| 5.62 | 5.76 | 5.90 | 6.04 | 6.19 | 6.34 | 6.49 | 6.65 | 6.81 | 6.98 | 7.15 | 7.32 | |
| 7.50 | 7.68 | 7.87 | 8.06 | 8.25 | 8.45 | 8.66 | 8.87 | 9.09 | 9.31 | 9.53 | 9.76 | |
| E192 | 1.00 | 1.01 | 1.02 | 1.04 | 1.04 | 1.06 | 1.07 | 1.09 | 1.10 | 1.11 | 1.13 | 1.14 |
| 1.15 | 1.17 | 1.18 | 1.20 | 1.21 | 1.23 | 1.24 | 1.26 | 1.27 | 1.29 | 1.30 | 1.32 | |
| 1.33 | 1.35 | 1.37 | 1.38 | 1.40 | 1.42 | 1.43 | 1.45 | 1.47 | 1.49 | 1.50 | 1.52 | |
| 1.54 | 1.56 | 1.58 | 1.60 | 1.62 | 1.64 | 1.65 | 1.67 | 1.69 | 1.72 | 1.74 | 1.76 | |
| 1.78 | 1.80 | 1.82 | 1.84 | 1.87 | 1.89 | 1.91 | 1.93 | 1.96 | 1.98 | 2.00 | 2.03 | |
| 2.05 | 2.08 | 2.10 | 2.13 | 2.15 | 2.18 | 2.21 | 2.23 | 2.26 | 2.29 | 2.32 | 2.34 | |
| 2.37 | 2.40 | 2.43 | 2.46 | 2.49 | 2.52 | 2.55 | 2.58 | 2.61 | 2.64 | 2.67 | 2.71 | |
| 2.74 | 2.77 | 2.80 | 2.84 | 2.87 | 2.91 | 2.94 | 2.98 | 3.01 | 3.05 | 3.09 | 3.12 | |
| 3.16 | 3.20 | 3.24 | 3.28 | 3.32 | 3.36 | 3.40 | 3.44 | 3.48 | 3.52 | 3.57 | 3.61 | |
| 3.65 | 3.70 | 3.74 | 3.79 | 3.83 | 3.88 | 3.92 | 3.97 | 4.02 | 4.07 | 4.12 | 4.17 | |
| 4.22 | 4.27 | 4.32 | 4.37 | 4.42 | 4.48 | 4.53 | 4.59 | 4.64 | 4.70 | 4.75 | 4.81 | |
| 4.87 | 4.93 | 4.99 | 5.05 | 5.11 | 5.17 | 5.23 | 5.30 | 5.36 | 5.42 | 5.49 | 5.56 | |
| 5.62 | 5.69 | 5.76 | 5.83 | 5.90 | 5.97 | 6.04 | 6.12 | 6.19 | 6.26 | 6.34 | 6.42 | |
| 6.49 | 6.57 | 6.65 | 6.73 | 6.81 | 6.90 | 6.98 | 7.06 | 7.15 | 7.23 | 7.32 | 7.41 | |
| 7.50 | 7.59 | 7.68 | 7.77 | 7.87 | 7.96 | 8.06 | 8.16 | 8.25 | 8.35 | 8.45 | 8.56 | |
| 8.66 | 8.76 | 8.87 | 8.98 | 9.09 | 9.20 | 9.31 | 9.42 | 9.53 | 9.65 | 9.76 | 9.88 |
| Řada | E3 | E6 | E12 | E24 | E48 | E96 | E192 |
| Tolerance (%) | ±20 | ±10 | ±5 | ±2 | ±1 | ±0.5 | ±0.25 |
Servomotor
Servomotor zkráceně Servo je motor pro pohony (většinou elektrické ale existují také hydraulická, pneumatická či dokonce parní serva), u kterých lze na rozdíl od běžného motoru nastavit přesnou polohu natočení osy. Ovládají se jím například posuvy u CNC strojů, nastavení čtecí hlavičky u pevného disku. Všechny RC (Radio control) modely používají malá modelářská serva.
Elektrické servomotory jsou řízeny prakticky výhradně tranzistorovými měniči s pulzní šířkovou modulací.
Poloha hřídele servomotoru je zjišťována elektricky pomocí fotoelektrického snímače (encoder) nebo pomocí rozkladače (selsynu). Pro levné aplikace lze použít optické snímání pomocí kódového kotoučku či proužku. Nedoporučuje se potenciometr.
Signál snímače polohy je přiveden pomocí zpětné vazby na regulátor, který porovnává skutečnou polohu motoru s žádanou polohou. Na základě rozdílu žádané a skutečné polohy regulátor (často velmi složitý) řídí měnič a tak nastavuje motor na žádanou polohu.
Střídavé servomotory (AC) jsou dnes nejpoužívanější typ servomotorů. Jsou to synchronní motory (bez kartáčů) s permanentními magnety na rotoru a třífázovým vinutím ve statoru. Dnešní konstrukce motorů používají permanentní magnety na bázi vzácných zemin (nejčastěji typ neodym – železo – bór). Motory lze několikanásobně momentově přetížit a proto jsou vhodné pro dynamicky náročné úlohy
Elektrodynamická brzda
Elektrodynamická brzda je zvláštní technické zařízení, které mění akumulovanou energii na elektrickou a tepelnou energii a tím ji maří. Připojený stroj je brzděn, čímž je regulována jeho rychlost.
Nejčastěji je využívána u kolových dopravních prostředků: lokomotiv, trolejbusů ale i některých autobusů a kamiónů. Může ale brzdit i dopravníkové pásy či jiná stacionární zařízení. Významné je i její užití u měřících přístrojů pro testy motorů.
V principu může být elektrodynamickou brzdou každý elektrický generátor resp. dynamo či alternátor. Obvykle se ale jako specializovaná brzda nepoužívá. Jako elektrodynamická brzda může totiž sloužit i elektromotor či elektromagnet.
- U stejnosměrného sériového motoru stačí otočit zapojení kotvy, nebo buzení a připojit spotřebič. Vznikne tak pozitivní zpětná vazba, motor se nabudí, spotřebič začne elektrickou energii odebírat a motor působí proti směru pohybu. Této možnosti se využívá především u historických vozů. V novějších strojích se používá častěji principu cize buzeného generátoru, kdy buzení a kotva nejsou zapojeny v jednom obvodu. Do buzení se dodává nejčastěji elektrická energie prostřednictvím napájecí troleje (nebo elektrického generátoru) a kotva je zdrojem elektrické energie, která se pak nevratně maří v odpornících, kde je přeměňována na ztrátové teplo
- Třífázový asynchronní motor začne vyrábět proud pokud úhlová rychlost točivého magnetického pole je menší než úhlová rychlost kotvy. Kotva se pak snaží přiblížit své otáčky točivému poli a opět působí proti pohybu. Takto vyrobená elektrická energie se pak buď opět nevratně maří na ztrátové teplo v elektrických odpornících, nebo se opět zužitkovává (rekuperací) elektrické energie zpět do napájecí soustavy.
- Elektrodynamická brzda odporová, tento typ elektrických brzd se používá u trakčních vozidel dopravních prostředků, poháněných stejnosměrnými elektromotory. Například u elektrických a dieselelektrických lokomotiv, tramvají, vozů metra a trolejbusů. Pokud je u daného dopravního prostředku využita odporová regulace výkonu, obvykle se k maření elektrického proudu využívají rozjezdové odporníky, což znamená, že při rozjezdu i při brzdění vozidla ( tj. při řízeném zrychlování či zpomalování vozidla ) se energie nevratně maří na ztrátové teplo v tomtéž zařízení.
- Elektromagnetická brzda se používá zejména při provozu tramvají coby nouzová bezpečností brzda pro rychlé zastavení pohybu vozidla. Vlastní brzdný účinek zde vyvíjí velký elektromagnet umístěný na podvozku vozidla nad kolejnicí, elektromagnet je přitahován přímo ke kolejím, v železničním provozu se tento typ brzdy nepoužívá
- Dalším systémem jsou brzdy pracující na principu vířivých proudů. Taková brzda se skládá z kovového kotouče a elektromagnetů. Kotouč rotuje v magnetickém poli, tím v něm vznikají proudy, které v něm také zanikají a tím jej zahřívají. Brzdný účinek lze regulovat intenzitou magnetického pole, to znamená velikostí proudu v elektromagnetech.
Elektrodynamická brzda má brzdnou sílu závislou přibližně na druhé mocnině rychlosti. Znamená to, že při malých rychlostech vozidla je její účinek prakticky nulový. Naopak při vysokých rychlostech je její účinek velmi vysoký. V praxi bývají elektrické brzdy kombinovány obvykle kombinuje s brzdami mechanickými (jejíž brzdná síla je prakticky nezávislá na rychlosti). Elektrické brzdy mohou být doplněny regulací (u nejnovějších konstrukčních řešení se jedná o regulaci elektronickou).
Dynamo
Dynamo je točivý elektrický stroj, přeměňující mechanickou energii z rotoru hnacího stroje na elektrickou energii ve formě stejnosměrného elektrického proudu. Jedná se o stejnosměrný generátor elektrické energie.
Dynamo se skládá ze statoru tvořeného magnetem nebo elektromagnetem a rotoru s vinutím a komutátorem.
Až do nástupu polovodičových usměrňovačů bylo dynamo nejvýznamnějším zdrojem elektrické energie (ve formě stejnosměrného proudu) v průmyslu i dopravě. Dnes jsou dynama vytlačována spolehlivějšími a konstrukčně jednoduššími alternátory a zařízeními pro následné usměrnění vyrobeného střídavého proudu na proud stejnosměrný – viz (usměrňovač).
Podle způsobu zapojení statoru dělíme dynama na:
- dynamo s permanentním magnetem
- dynamo s cizím buzením – typicky v průmyslové výrobě elektrického proudu. Budící proud zajišťovalo jiné menší dynamo
- derivační dynamo (budící vinutí zapojeno paralelně se zátěží) – vhodné pro malé proudové odběry
- sériové dynamo (budící vinutí zapojeno sériově se zátěží)
- kompaudní dynamo – kombinace derivačního a sériového dynama. Jednalo se o běžný typ v dopravě a u strojů, kde je velmi proměnlivá zátěž. Sériové vinutí statoru zajišťuje dostatečné buzení při malé impedanci zátěže, derivační vinutí při velké impedanci.
U dynam, která nemají cizí buzení nebo permanentní magnet, může nastat problém s jejich rozjezdem. Dokud dynamo nevyrábí proud, není samo buzeno, a tudíž ani nemůže začít vyrábět proud. Při prvním rozjezdu je tedy třeba dodat rotujícímu dynamu malý proudový impuls, později se už lze obvykle spolehnout na remanentní (zbytkový) magnetismus statoru.
Elektromotor
Elektromotor je elektrický točivý stroj, měnící elektrickou energii na mechanickou práci. Opačnou přeměnu, tedy změnu mechanické práce na elektrickou energii, provádí generátor např. dynamo, či alternátor. Často bývají tato zařízení velmi podobná či zcela identická (až na některé drobné konstrukční detaily).
Většina elektromotorů pracuje na elektromagnetickém principu, ale existují i motory založené na jiných elektromechanických jevech jako jsou elektrostatické síly, piezoelektrický efekt či tepelné účinky průchodu elektrického proudu. Základním principem, na němž jsou elektromagnetické motory založeny, je vzájemné silové působení elektromagnetických polí vytvářených elektrickými obvody, kterými protéká elektrický proud. Tuto sílu popisuje Lorentzův zákon síly.
V běžném rotačním motoru je umístěn rotor tak, aby magnetické pole vytvářené ve vodičích rotoru a magnetické pole statoru vyvíjely kroutící moment přenášený na rotor stroje. Tento kroutící moment pak způsobuje kýženou rotaci otáčivé části stroje – rotoru, motor se točí a vykonává mechanickou práci.
Většina běžných elektrických motorů je konstruována na rotačním principu, ale existují i netočivé varianty elektromotorů, například lineární elektromotor, kdy rotor stroje tvoří statický pás umístěný podél pojezdové dráhy stroje (rotor je jakoby rozvinut do délky a neotáčí se). Tento druh motorů se v technické praxi používá zejména pro některá speciální dopravní zařízení. V elektrickém točivém stroji se rotující část stroje nachází obvykle uvnitř, nazývá se podle své základní funkce rotor. Statická netočivá ( t.j. pevná ) část stroje se podle své funkce nazývá stator. Stejnosměrný elektromotor může obsahovat pevně spojenou sadu elektromagnetů umístěných obvykle na rotoru, u střídavých asynchronních elektromotorů (nejběžnější typ elektromotoru vůbec) mívá rotor jiné konstrukční uspořádání, obvykle se jedná o zvláštní elektrický obvod ve formě vodivé klece ve spojení nakrátko. Rám elektromotoru se zastarale nazývá kotva, jde však o nesprávné použití termínu. Jako „kotva“ má být označována ta část elektromotoru, která koná práci, nebo ta část elektrického generátoru, přes kterou se generuje výstupní napětí. Podle typu motoru může jako kotva sloužit rotor i stator. Termín je zastaralý a vlastně i dost zavádějící, neboť z obecného hlediska práci provádí vždy celý stroj jakožto celek, nikoliv jen jedna jeho část.
Motory na stejnosměrný proud
Jeden z prvních rotačních elektromotorů, možná i vůbec první, vynalezl Michael Faraday v roce 1821. Motor se skládal z volně zavěšeného drátu ponořeného do nádrže rtuti. Ve středu nádrže byl umístěn permanentní magnet. Elektrický proud procházel drátem, drát rotující kolem magnetu pak prokazoval, že proud vytvořil otáčivé magnetické pole kolem drátu.
Moderní motor na stejnosměrný proud byl náhodně objeven v roce 1873, když Zénobe Gramme vodivě spojil roztočené dynamo s druhým stojícím dynamem, z něhož se tím stal napájený motor.
Motor s permanentním magnetem
Nejjednodušší motor na stejnosměrný proud má stator tvořený permanentním magnetem a rotující kotvu ve formě elektromagnetu s dvěma póly. Rotační přepínač zvaný komutátor mění směr elektrického proudu a polaritu magnetického pole procházejícího kotvou dvakrát během každé otáčky. Tím zajistí, že síla působící na póly rotoru má stále stejný směr. V okamžiku přepnutí polarity udržuje běh tohoto motoru ve správném směru setrvačnost. (Principielně se tento motor trochu podobá střídavému synchronnímu motoru, kde rotační přepínání směru proudu a jím vytvářeného magnetického pole zajišťuje sama elektrorozvodná síť.)
Motory s permanentním magnetem se dodnes využívají například v modelářství. Jen kotva je obvykle minimálně třípólová, aby nevznikal problém s mrtvým úhlem motoru. Výhodou motoru s permanentním magnetem je možnost snadno měnit směr otáčení polaritou vstupního napětí.
Komutátor zajistí, že se v cívce změní směr proudu + a – (- a +) po každém pootočení o 180° (u dvoupólového motoru). Takto dochází ke změně směru indukčních siločar v cívce.
Funkce stejnosměrného motoru
Rotor (kotva) je přes oranžový komutátor připojen ke zdroji stejnosměrného napětí. Stator je tvořen dvěma velkými permanentními magnety.
Vzhledem k polaritě statoru a rotoru se souhlasné póly (barvy) odpuzují a rotor se otáčí.
Opačné póly se přitahují, rotor se stále otáčí. V okamžiku, kdy se rotor dostane do vodorovné polohy, dojde na komutátoru k přepnutí polarity magnetického pole rotoru.
Obecné vlastnosti stejnosměrných motorů
Rychlost motoru na stejnosměrný proud obecně závisí na velikosti napětí a proudu procházejících vinutím motoru a na zátěži neboli velikosti brzdného momentu. Rychlost motoru při daném brzdném momentu je úměrná napětí a točivý moment je úměrný proudu. Rychlost motoru lze regulovat změnou vstupního napětí.
Výhodou stejnosměrných motorů je relativní jednoduchost a univerzálnost využití. Sériový a derivační motor mohou fungovat nejen na stejnosměrný, ale i střídavý proud nízkých frekvencí. Jsou to tedy motory univerzální. Další výhodou proti motorům střídavým je možnost dosáhnout libovolných mechanicky dosažitelných otáček (motory na střídavý proud mají obvykle otáčky omezeny frekvencí sítě – 50Hz = 3000 ot/min). Proto tyto motory nacházejí uplatnění v takových strojích, jako jsou vrtačky, mixéry, ale třeba i automobily a dopravní zařízení s elektrickou trakcí (např. lokomotivy, trolejbusy, tramvaje či vozy metra).
Největší nevýhodou stejnosměrných motorů je existence komutátoru. Je to mechanický přepínač, který spíná velké proudy a je — kromě náchylnosti k poruchám — náročný na údržbu a seřízení, jedná se o mechanicky poměrně značně namáhané zařízení vyžadující pravidelnou údržbu či výměnu některých jeho součástí. Jiskření na kartáčcích (tvořených obvykle bloky čistého uhlíku) je zdrojem významného elektromagnetického rušení. S rozvojem levnější a spolehlivější silnoproudé elektroniky (tedy zejména výkonovými tyristory a tranzistory) jsou proto stejnosměrné motory postupně vytlačovány motory s rotujícím magnetickým polem buzeným elektronicky.
U sériových a derivačních motorů nelze změnit směr otáčení pouhým přepólováním napájecího napětí celého motoru – protože by došlo k přepólování statoru i rotoru, směr otáčení by zůstal zachován. Pro změnu směru je třeba přepólovat jen stator nebo jenom rotor.
Motory na střídavý proud
Synchronní
Synchronní motor je v principu obrácený generátor střídavého proudu. Rotor je tvořen magnetem nebo elektromagnetem, stator, na nějž je přiveden střídavý proud, vytváří pulzní nebo častěji rotující magnetické pole. Rotor se snaží udržet polohu souhlasící s tímto polem. Magnet umístěný v rotoru se snaží uchovat si svoji konstantní polohu vůči otáčivému magnetickému poli vyvářenému průchodem střídavého proudu ve statoru.
Synchronní motory mají řadu nevýhod – je třeba je roztočit na pracovní otáčky jiným strojem nebo pomocným asynchronním rozběhovým vinutím, pokud pod zátěží ztratí synchronizaci s rotujícím polem, skokově klesne jejich výkon a zastaví se. Proto jsou využívány jen ve speciálních případech (např. pohon gramofonu, kdy jsou nevýhody vyváženy požadavkem na pravidelnost otáček o celočíselném násobku frekvence elektrické sítě (za předpokladu, že frekvence napájecí sítě je skutečně konstantní). Ze synchronního motoru se vyvinul krokový motor a střídavý servomotor.
Asynchronní
Asynchronní motor má proti synchronnímu jinou konstrukci rotoru. Rotor se obvykle skládá ze sady vodivých tyčí, uspořádaných do tvaru válcové klece. Tyče jsou na koncích vodivě spojeny a rotor se pak nazývá „kotva nakrátko“. U stojícího motoru rotující magnetické pole statoru indukuje v tyčích rotoru elektrické proudy, které vytváří své vlastní elektromagnetické pole. Obě magnetická pole (rotoru a statoru) pak spolu navzájem reagují a vzniká tak elektromotorická síla. Otáčky rotoru vzrůstají. Tím, jak se přibližují otáčky rotoru otáčkám magnetického pole, klesají indukované proudy a intenzita jimi vytvářeného pole, klesají tím i otáčky rotoru a tím i točivý moment motoru. Pokud je motor alespoň minimálně zatížen, nikdy nedosáhne otáček daných frekvencí napájecího proudu ( není s ní nikdy synchronní – proto se nazývá asynchronní motor).
Tento druh motoru je v praxi nejběžnější, využívá v mnoha oblastech průmyslu, dopravy i v domácnostech. Jeho výkon se pohybuje od stovek wattů až do mnoha set kilowattů. S rozvojem levných a výkonných elektronických řídicích systémů nahrazuje postupně tento druh motoru sériový elektromotor, užívaný zejména v pohonech určených pro elektrickou trakci ( kolejová vozidla a trolejbusy ). Asynchronními elektromotory jsou vybaveny i moderní rychlovlaky známé z našich železničních tratí pod názvem Pendolino.