Rubrika: Elektrotechnika
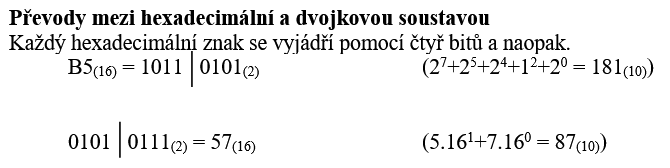
Převody mezi číselnými soustavami
Číselné soustavy používané pro zobrazování v počítači patří mezi soustavy poziční, tj. desítková hodnota každé číslice (znaku) závisí na její pozici vzhledem k řádové čárce.
Váhy v jednotlivých pozicích jsou mocniny základu soustavy.
U desítkové soustavy jsou to mocniny 10
u dvojkové soustavy mocniny 2
u hexadecimální mocniny 16
Desítkové číslo 725 lze tedy rozložit takto:
7*102+2*101+5*100
Podobně postupujeme u čísel vyjádřených ve dvojkové nebo šestnáctkové soustavě, (nebo kterékoliv jiné soustavě) chceme-li zjistit jejich desítkový ekvivalent.
Mocniny základu dvojkové soustavy
| 21 | 22 | 23 | 24 | 25 | 26 | 27 | 28 | 29 | 210 | atd. |
| 2 | 4 | 8 | 16 | 32 | 64 | 128 | 256 | 512 | 1024 | atd |
Příklady:
Převod z dvojkové do desítkové soustavy
01010111(2) = 1*26 +0*25 +1*24 +0*23 +1*22 +1*21 +1*20 =87(10)
Převod z šestnáctkové do desítkové soustavy
B5(16) = 11*161 +5*160 = 181(10)
U opačných převodů z desítkové soustavy do jiné musíme zjistit, která nejvyšší mocnina základu té soustavy, do níž převádíme, je v desítkovém čísle obsažena, eventuelně kolikrát, jde-li o soustavy s vyšším základem než 2.
Pak je třeba zapsat v příslušné pozici zbytek po odečtení mocniny od převáděného čísla (či po odečtení násobku mocniny)a celý postup opakovat pro výsledek (rozdíl).
Obvykle se používá mechanický postup dělení čísla základem soustavy a zaznamenávání zbytků (u hexadecimální soustavy můžeme dostat možné hodnoty u zbytku 1 – 15, nebo-li 1 – F).
Zbytky zapisujeme od konce, tj. od nejnižšího řádu výsledné převedené hodnoty.
Dílčí výsledky opět dělíme základem soustavy a výsledek posledního dělení je číslice (příp. znak) nejvyššího řádu. Dílčí výsledky opět dělíme základem soustavy a výsledek posledního dělení je číslice (příp. znak) nejvyššího řádu.


Všimněte si, že pro záznam třímístného desítkového čísla 181 stačí dva hexadecimální znaky, z nichž každý se převede na čtveřici bitů.
Čtveřice bitů (16 kombinací) a jejich odpovídající desítková hodnota (tučně)
dvouciferná čísla nahrazena písmenem , využito v hexadecimální soustavě, 1 čtveřice bitů = 1 šestnáctkový znak, tak se využije všech 16 možností
do 3 bytů, ve kterých je uložena mantisa (při uložení v pohyblivé řádové čárce), se tak „vejde“ větší číslo – až 7 desítkových číslic (=6 hexadecimálních znaků) = tzv. jednoduchá přesnost
písmena představují též desítkovou hodnotu
0000 0 0100 4 1000 8 1100 12 =C
0001 1 0101 5 1001 9 1101 13 =D
0010 2 0110 6 1010 10 =A 1110 14 =E
0011 3 0111 7 1011 11 =B 1111 15 =F
Excelovský převodník z dvojkové do desítkové
Spínací technika
Základy automatizace
Elektrotechnické materiály
http://ulozto.cz/xDVDn1PD/elektrotechnicke-materialy-pdf
Hodnoty součástí v řadách
| E3 | 1.0 | 2.2 | 4.7 | |||||||||
| E6 | 1.0 | 1.5 | 2.2 | 3.3 | 4.7 | 6.8 | ||||||
| E12 | 1.0 | 1.2 | 1.5 | 1.8 | 2.2 | 2.7 | 3.3 | 3.9 | 4.7 | 5.6 | 6.8 | 8.2 |
| E24 | 1.0 | 1.1 | 1.2 | 1.3 | 1.5 | 1.6 | 1.8 | 2.0 | 2.2 | 2.4 | 2.7 | 3.0 |
| 3.3 | 3.6 | 3.9 | 4.3 | 4.7 | 5.1 | 5.6 | 6.2 | 6.8 | 7.5 | 8.2 | 9.1 | |
| E48 | 1.00 | 1.05 | 1.10 | 1.15 | 1.21 | 1.27 | 1.33 | 1.40 | 1.47 | 1.54 | 1.62 | 1.69 |
| 1.78 | 1.87 | 1.96 | 2.05 | 2.15 | 2.26 | 2.37 | 2.49 | 2.61 | 2.74 | 2.87 | 3.01 | |
| 3.16 | 3.32 | 3.48 | 3.65 | 3.83 | 4.02 | 4.22 | 4.42 | 4.64 | 4.87 | 5.11 | 5.36 | |
| 5.62 | 5.90 | 6.19 | 6.49 | 6.81 | 7.15 | 7.50 | 7.87 | 8.25 | 8.66 | 9.09 | 9.53 | |
| E96 | 1.00 | 1.02 | 1.05 | 1.07 | 1.10 | 1.13 | 1.15 | 1.18 | 1.21 | 1.24 | 1.27 | 1.30 |
| 1.33 | 1.37 | 1.40 | 1.43 | 1.47 | 1.50 | 1.54 | 1.58 | 1.62 | 1.65 | 1.69 | 1.74 | |
| 1.78 | 1.82 | 1.87 | 1.91 | 1.96 | 2.00 | 2.05 | 2.10 | 2.15 | 2.21 | 2.26 | 2.32 | |
| 2.37 | 2.43 | 2.49 | 2.55 | 2.61 | 2.67 | 2.74 | 2.80 | 2.87 | 2.94 | 3.01 | 3.09 | |
| 3.16 | 3.24 | 3.32 | 3.40 | 3.48 | 3.57 | 3.65 | 3.74 | 3.83 | 3.92 | 4.02 | 4.12 | |
| 4.22 | 4.32 | 4.42 | 4.53 | 4.64 | 4.75 | 4.87 | 4.99 | 5.11 | 5.23 | 5.36 | 5.49 | |
| 5.62 | 5.76 | 5.90 | 6.04 | 6.19 | 6.34 | 6.49 | 6.65 | 6.81 | 6.98 | 7.15 | 7.32 | |
| 7.50 | 7.68 | 7.87 | 8.06 | 8.25 | 8.45 | 8.66 | 8.87 | 9.09 | 9.31 | 9.53 | 9.76 | |
| E192 | 1.00 | 1.01 | 1.02 | 1.04 | 1.04 | 1.06 | 1.07 | 1.09 | 1.10 | 1.11 | 1.13 | 1.14 |
| 1.15 | 1.17 | 1.18 | 1.20 | 1.21 | 1.23 | 1.24 | 1.26 | 1.27 | 1.29 | 1.30 | 1.32 | |
| 1.33 | 1.35 | 1.37 | 1.38 | 1.40 | 1.42 | 1.43 | 1.45 | 1.47 | 1.49 | 1.50 | 1.52 | |
| 1.54 | 1.56 | 1.58 | 1.60 | 1.62 | 1.64 | 1.65 | 1.67 | 1.69 | 1.72 | 1.74 | 1.76 | |
| 1.78 | 1.80 | 1.82 | 1.84 | 1.87 | 1.89 | 1.91 | 1.93 | 1.96 | 1.98 | 2.00 | 2.03 | |
| 2.05 | 2.08 | 2.10 | 2.13 | 2.15 | 2.18 | 2.21 | 2.23 | 2.26 | 2.29 | 2.32 | 2.34 | |
| 2.37 | 2.40 | 2.43 | 2.46 | 2.49 | 2.52 | 2.55 | 2.58 | 2.61 | 2.64 | 2.67 | 2.71 | |
| 2.74 | 2.77 | 2.80 | 2.84 | 2.87 | 2.91 | 2.94 | 2.98 | 3.01 | 3.05 | 3.09 | 3.12 | |
| 3.16 | 3.20 | 3.24 | 3.28 | 3.32 | 3.36 | 3.40 | 3.44 | 3.48 | 3.52 | 3.57 | 3.61 | |
| 3.65 | 3.70 | 3.74 | 3.79 | 3.83 | 3.88 | 3.92 | 3.97 | 4.02 | 4.07 | 4.12 | 4.17 | |
| 4.22 | 4.27 | 4.32 | 4.37 | 4.42 | 4.48 | 4.53 | 4.59 | 4.64 | 4.70 | 4.75 | 4.81 | |
| 4.87 | 4.93 | 4.99 | 5.05 | 5.11 | 5.17 | 5.23 | 5.30 | 5.36 | 5.42 | 5.49 | 5.56 | |
| 5.62 | 5.69 | 5.76 | 5.83 | 5.90 | 5.97 | 6.04 | 6.12 | 6.19 | 6.26 | 6.34 | 6.42 | |
| 6.49 | 6.57 | 6.65 | 6.73 | 6.81 | 6.90 | 6.98 | 7.06 | 7.15 | 7.23 | 7.32 | 7.41 | |
| 7.50 | 7.59 | 7.68 | 7.77 | 7.87 | 7.96 | 8.06 | 8.16 | 8.25 | 8.35 | 8.45 | 8.56 | |
| 8.66 | 8.76 | 8.87 | 8.98 | 9.09 | 9.20 | 9.31 | 9.42 | 9.53 | 9.65 | 9.76 | 9.88 |
| Řada | E3 | E6 | E12 | E24 | E48 | E96 | E192 |
| Tolerance (%) | ±20 | ±10 | ±5 | ±2 | ±1 | ±0.5 | ±0.25 |
Servomotor
Servomotor zkráceně Servo je motor pro pohony (většinou elektrické ale existují také hydraulická, pneumatická či dokonce parní serva), u kterých lze na rozdíl od běžného motoru nastavit přesnou polohu natočení osy. Ovládají se jím například posuvy u CNC strojů, nastavení čtecí hlavičky u pevného disku. Všechny RC (Radio control) modely používají malá modelářská serva.
Elektrické servomotory jsou řízeny prakticky výhradně tranzistorovými měniči s pulzní šířkovou modulací.
Poloha hřídele servomotoru je zjišťována elektricky pomocí fotoelektrického snímače (encoder) nebo pomocí rozkladače (selsynu). Pro levné aplikace lze použít optické snímání pomocí kódového kotoučku či proužku. Nedoporučuje se potenciometr.
Signál snímače polohy je přiveden pomocí zpětné vazby na regulátor, který porovnává skutečnou polohu motoru s žádanou polohou. Na základě rozdílu žádané a skutečné polohy regulátor (často velmi složitý) řídí měnič a tak nastavuje motor na žádanou polohu.
Střídavé servomotory (AC) jsou dnes nejpoužívanější typ servomotorů. Jsou to synchronní motory (bez kartáčů) s permanentními magnety na rotoru a třífázovým vinutím ve statoru. Dnešní konstrukce motorů používají permanentní magnety na bázi vzácných zemin (nejčastěji typ neodym – železo – bór). Motory lze několikanásobně momentově přetížit a proto jsou vhodné pro dynamicky náročné úlohy
Elektrodynamická brzda
Elektrodynamická brzda je zvláštní technické zařízení, které mění akumulovanou energii na elektrickou a tepelnou energii a tím ji maří. Připojený stroj je brzděn, čímž je regulována jeho rychlost.
Nejčastěji je využívána u kolových dopravních prostředků: lokomotiv, trolejbusů ale i některých autobusů a kamiónů. Může ale brzdit i dopravníkové pásy či jiná stacionární zařízení. Významné je i její užití u měřících přístrojů pro testy motorů.
V principu může být elektrodynamickou brzdou každý elektrický generátor resp. dynamo či alternátor. Obvykle se ale jako specializovaná brzda nepoužívá. Jako elektrodynamická brzda může totiž sloužit i elektromotor či elektromagnet.
- U stejnosměrného sériového motoru stačí otočit zapojení kotvy, nebo buzení a připojit spotřebič. Vznikne tak pozitivní zpětná vazba, motor se nabudí, spotřebič začne elektrickou energii odebírat a motor působí proti směru pohybu. Této možnosti se využívá především u historických vozů. V novějších strojích se používá častěji principu cize buzeného generátoru, kdy buzení a kotva nejsou zapojeny v jednom obvodu. Do buzení se dodává nejčastěji elektrická energie prostřednictvím napájecí troleje (nebo elektrického generátoru) a kotva je zdrojem elektrické energie, která se pak nevratně maří v odpornících, kde je přeměňována na ztrátové teplo
- Třífázový asynchronní motor začne vyrábět proud pokud úhlová rychlost točivého magnetického pole je menší než úhlová rychlost kotvy. Kotva se pak snaží přiblížit své otáčky točivému poli a opět působí proti pohybu. Takto vyrobená elektrická energie se pak buď opět nevratně maří na ztrátové teplo v elektrických odpornících, nebo se opět zužitkovává (rekuperací) elektrické energie zpět do napájecí soustavy.
- Elektrodynamická brzda odporová, tento typ elektrických brzd se používá u trakčních vozidel dopravních prostředků, poháněných stejnosměrnými elektromotory. Například u elektrických a dieselelektrických lokomotiv, tramvají, vozů metra a trolejbusů. Pokud je u daného dopravního prostředku využita odporová regulace výkonu, obvykle se k maření elektrického proudu využívají rozjezdové odporníky, což znamená, že při rozjezdu i při brzdění vozidla ( tj. při řízeném zrychlování či zpomalování vozidla ) se energie nevratně maří na ztrátové teplo v tomtéž zařízení.
- Elektromagnetická brzda se používá zejména při provozu tramvají coby nouzová bezpečností brzda pro rychlé zastavení pohybu vozidla. Vlastní brzdný účinek zde vyvíjí velký elektromagnet umístěný na podvozku vozidla nad kolejnicí, elektromagnet je přitahován přímo ke kolejím, v železničním provozu se tento typ brzdy nepoužívá
- Dalším systémem jsou brzdy pracující na principu vířivých proudů. Taková brzda se skládá z kovového kotouče a elektromagnetů. Kotouč rotuje v magnetickém poli, tím v něm vznikají proudy, které v něm také zanikají a tím jej zahřívají. Brzdný účinek lze regulovat intenzitou magnetického pole, to znamená velikostí proudu v elektromagnetech.
Elektrodynamická brzda má brzdnou sílu závislou přibližně na druhé mocnině rychlosti. Znamená to, že při malých rychlostech vozidla je její účinek prakticky nulový. Naopak při vysokých rychlostech je její účinek velmi vysoký. V praxi bývají elektrické brzdy kombinovány obvykle kombinuje s brzdami mechanickými (jejíž brzdná síla je prakticky nezávislá na rychlosti). Elektrické brzdy mohou být doplněny regulací (u nejnovějších konstrukčních řešení se jedná o regulaci elektronickou).